Kõik, kes on kunagi pidanud joonistama mõne protsessi kaardistamise jaoks spageti diagrammi teavad, kui aeganõudev see ühe mitmetunnise töökoha efektiivsuse analüüsi puhul on.
Viimati, kui seda ühes restoranis kuumtoidu koka töökoha analüüsi tarbeks tegin, küsiti minult, kas tõesti ei ole mõnda digitaalset või tehnilist lahendust, et seda väiksema ajavaevaga teha. Piinlik, et selle peale varem ise ei ole tulnud. Kuidagi rutiiniks oli kujunenud video pealt spageti-diagrammi käsitsi joonistamine ning selle kohati mitmetunnine ajavõtt tundus paratamatuna.
Liikumise kaardistamise hõlbustamiseks on vaja järelikult mingit süsteemi, mis suudab objekti ruumis lokaliseerida. Mõningase otsimise peale nii internetist kui ka erinevatest positsioneerimise teadustöödest jõudsin peamiselt kolme võimaliku lahenduseni: GPS (global positioning system), Wi-Fi positsioneerimine ning ultraheli positsioneerimine. Järgnevalt vaatlemegi neid kolme, mis on nende eelised ja puudused protsessis esineva liikumise kaardistamiseks ning milline neist reaalse katsetamiseni jõudis.
Tõsi, oli ka neljas valik, GSM positsioneerimine, kuid see oma ülisuure veamääraga (100-200 meetrit) ei olnud väärt kaalumist.
GPS – globaalne asukoha määramise süsteem
Millegipärast tuli esimese asjana kohe mõttesse Endomondo rakendus, kui hakkasin liikumiste analüüsiks positsioneerimise süsteemi otsima. Rakendus on mõeldud jooksjatele, kes hiljem kodus kaardilt läbitud distantsi vaadata saavad, mis oli justkui selline lahendus, mida vaja. Positsioneerimiseks kasutab rakendus GPS-i.
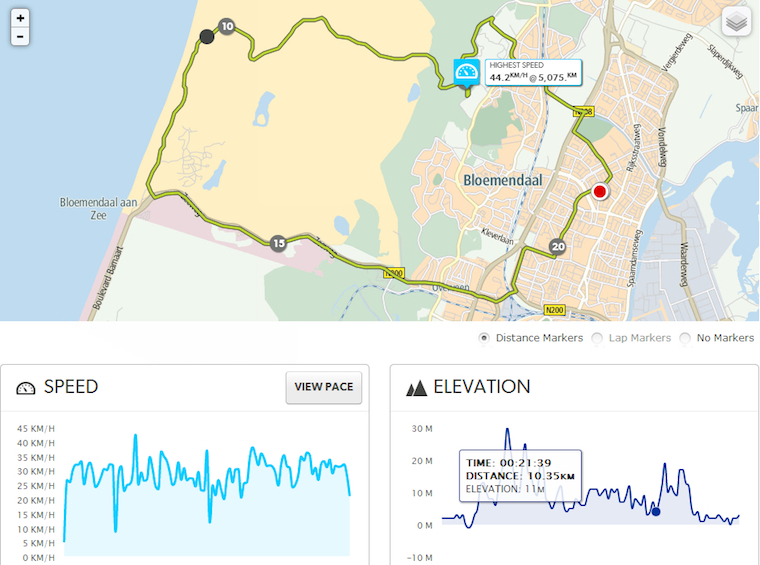
Kuvatõmmis Endomondo sportimisega seotud liikumise kaardistamisrakendusest.
Ilmselt ei vaja GPS väga pikka tutvustust. See koosneb 24 satelliidist, mis tiirlevad maapinnast umbes 20 000 kilomeetri kõrgusel. GPS-vastuvõtja mõõdab oma asukoha määramiseks kaugusi neljast satelliidist ning täpsus sõltub kahest faktorist: satelliitide koordinaatide ning vastuvõtja ja satelliitide vaheliste kauguste mõõtmise täpsusest. Üldjuhul on sellise süsteemi täpsuseks tavaseadmetega (näiteks mobiiltelefon või GPS seade) 5-7m 95% tõenäosusega.
GPS-i rakendamisvõimalused töökoha efektiivsuse analüüsiks on siiski üsna piiratud. Siseruumides on selle kasutamine täiesti välistatud ning õuealal peab arvestama üsna kesise täpsusega. Näiteks õuealal opereeriva lao tööoperatsioonide analüüsist ei tuleks välja, millisest laopositsioonist tõstuk kaubad võttis ning detailseks ülevaateks oleks süsteem kasutu.
Väga pikkade vahemaadega õueala operatsioonides oleks süsteemil muidugi jumet ning analüüsi saaks teha isegi Endomondo rakendust kasutades.
Wi-Fi positsioneerimine
Kui sai selgeks, et GPS-i ei saa siseruumides kuidagi kasutada, siis juhtis teaduskirjandus mind väljendi “indoor positioning system” juurde. Selles kategoorias on kõige levinumaks süsteemiks Wi-Fi positsioneerimine. Eelkõige kasutavad või plaanivad kasutada Wi-Fi positsioneerimist suured kaubanduskeskused, et inimesi selles suures hoones paremini juhendada ning vajalikul momendil väärtuspakkumisi teha.
WiFi positsioneerimine on kasvav trend kaubamajades ning arendamisel hetkel ka Google’i poolt, kuid kahjuks ei ole turul veel süsteemi, mis oleks piisavalt täpne ning liikumist spageti diagrammina kujutaks.
Positsioneerimine tagatakse selles süsteemis enamjaolt pääsupunktide (leviala tekitajad) ning vastuvõtja (näiteks mobiiltelefon) trilateratsiooni ning WiFi signaalitugevuse kaudu. Täpsuseks hinnatakse sellel lahendusel 5-15m.
Sarnaselt GPS-ile on ka selle süsteemi miinuseks positsioneerimise täpsus, mis sobib vaid olukordadesse, kus tööala on väga suur ning objekti detailne paiknemine ei ole oluline. Lisaks nõuab WiFi lahendus mitmete pääsupunktide tekitamist, mis on aktsepteeritav statsionaarse süsteemi puhul, kuid ei ole mõeldav nö kaasaskantava süsteemina. Samuti puudub hetkel turul lahendus, et liikumist kaardil/alusplaanil joonena kuvada.
Ultraheli positsioneerimine
Tuleb tunnistada, et ultraheli positsioneerimise otsa sai komistatud täiesti juhuslikult. Ja nagu ikka juhuslike avastustega, kipuvad need olema just need kõige õigemad. Nii ka seekord.
Ültraheli positsioneerimissüsteemis on statsionaarsed majakad (paigutatakse ruumis üksteise suhtes otsenähtavusega 30m vahedega), mis toimivad kui saatjad ning liikuv majakas, mis toimib kui vastuvõtja. Liikuva majaka asukoht arvutatakse ultraheli signaali levimisviivituse ning trilateratsiooni põhjal.
Ja nüüd tuleb kõige tähtsam. Süsteemi täpsus on + – 2cm. Lisaks võimaldab see 3D positsioneerimist, mis töökoha efektiivsuse ja ergonoomika analüüsimise seisukohalt on väga oluline võimekus.
Peamiselt kasutatakse ultraheli positsioneerimist robotite ja droonide täpseks juhtimiseks piiratud alal (piisaval arvul majakate olemasolul võiks ala olla suuremgi, kuid nõuab sellisel juhul juba korralikku investeeringut, kuna majakate maksimaalne kaugus võib olla kuni 30m).

Turul leiduvad ultraheli-majakad on väikeste mõõtudega ning lihtne seintele kinnitada. Erinevates asukohtades töökoha efektiivsuse analüüsi läbi viimiseks lausa ideaalsed.
Sõltuvalt pakkujatest (neid tuleb küll tikutulega otsida, leidsin vaid kaks – Pozyx ja Marvelmind) võiks 1000m2 ala positsioneerimissüsteemi maksumuseks kujuneda 400-1000 eurot (see on 4-5 majakat). Kui ruum on liigendatud, siis muidugi kulub ultraheli majakaid rohkem, kuna need vajavad omavahel otsenähtavust (trilateratsioonpositsioneerimiseks peavad kolm majakat omavahel otsenähtavuses olema).
Ultraheli positsioneerimissüsteemi katsetamine töökoha efektiivsuse analüüsiks
Kuna töökoha efektiivsuse analüüsiks pole minu teada keegi varem ultraheli positsioneerimissüsteemi rakendanud, siis tuli üks komplekt soetada ning ise katsetused läbi viia. Valikuks osutus Marvelmind’i komplekt, kuna nendel on tasuta kaasas ka programm, kuhu on võimalik sisestada kaart või alusplaan kohast, kus positsioneerimist on plaanis teha.

Marvelmind pakkus oma süsteemi jaoks ka spetsiaalset programmi, millele sai lisada alusplaani kaardistatavas alast.
Süsteemi testimine toimus metallitööstusettevõttes haavelduskambri ettevalmistustöid analüüsides. Kasutuses oli 4 saatemajakat ning üks oli paigutatud kiiver-mütsi külge, mida kandis töid teostav operaator. Lisaks jäädvustasid olukorda mitut kaamerat, seal hulgas prill-kaamerad, et saada detailne ülevaade operaatori erinevatest töövõtetest.
Kuna Marvelmindi programm ei salvesta videona üles kogu liikumist, siis tuli soetada lisaks ekraanisalvestusprogramm, mis selle töö hõlpsasti ära tegi. Hiljem tuli kõigest omavahel videotöötlusprogrammis kombineerida andurite poolt kaardistatud liikumise spageti-diagramm ning operaatori kaamera-prillidest tulev pilt ning saadud materjal oli edasiseks analüüsiks suurepärane kombinatsioon. Järgnev videokokkuvõte annab ehk hea ülevaate sellest.
Millal vajaks töökoha efektiivsuse analüüs digitaalset lahendust?
Tõtt öelda on nende andurite paigutamine, otsenähtavuse tagamine ning programmis töötama saamine üks parasjagu aeganõudev tegevus. 4-5 anduri töölesaamiseks kulus katsetamise käigus ca 1 h. Ilmselgelt ei ole see lühikese tööoperatsiooni kaardistamiseks mõistlik.
Samas, kui kaardistatav tööprotsess on ajaliselt pikk, siis vaev tasub end kuhjaga ära. Lisaks võimaldab ultrahelianduritel süsteem jooksma panna mitu majakat, mis teeb mitme objekti jälgimise protsessis veel eriti lihtsaks.
Hilisemaks analüüsiks on prillide ja süsteemi poolt kaardistatu muidugi super. Programm kaardistab distantsid, ajad, isegi kõrguse maapinnast ning prillidest saadav pilt annab hea ülevaate kasutatavatest töövõtetest, mis parima praktika jagamisel/õpetamisel on omaette väärtus.
Soovitan sellist tehnilist kombinatsiooni kõigile, kes igapäevaselt sarnaseid analüüse (näiteks SMED-i) teostavad.